

Humanoid robots are finally crossing from research labs into real-world use, and NEO, developed by 1X Technologies, is among the most advanced efforts focused on everyday human environments. NEO has now entered the market through direct sales and pre-orders, with deliveries rolling out in phases. That means it can be ordered and paid for today, but it is not yet widely delivered or available through traditional retail stores. In other words, it has “hit the market,” just in an early-access, controlled rollout rather than mass consumer distribution.
What Is NEO?
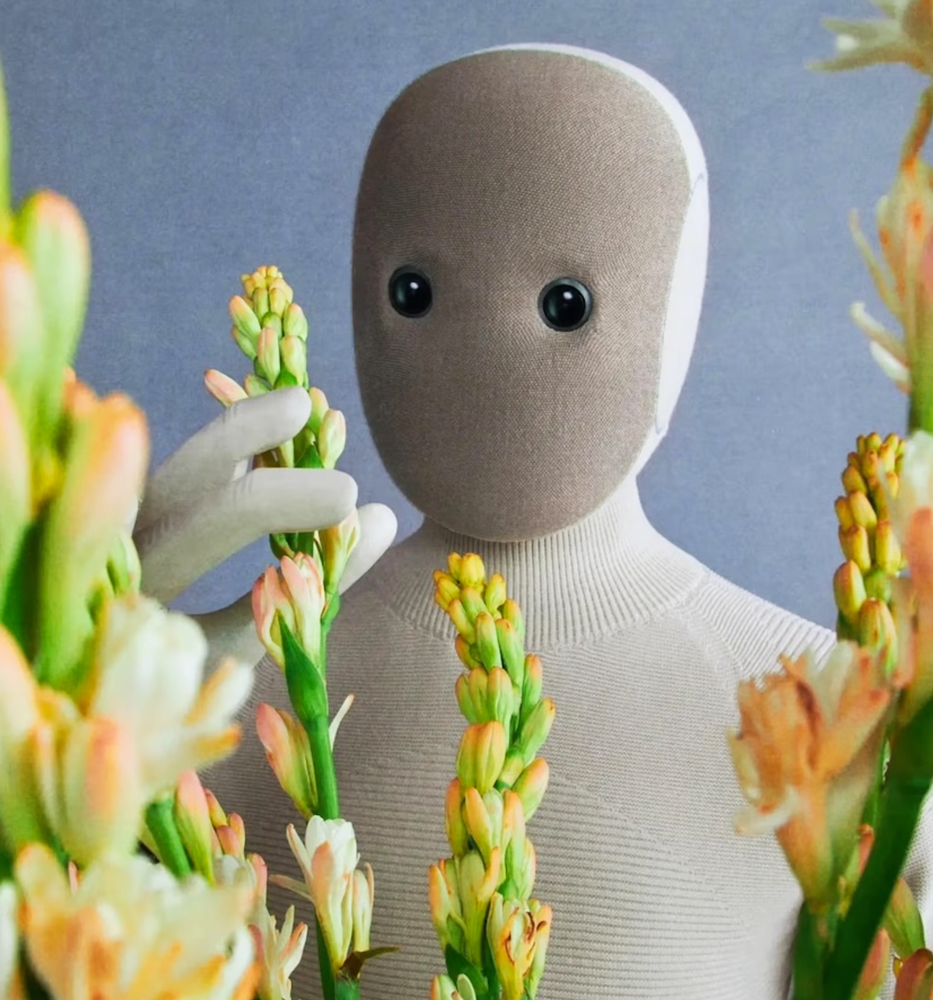
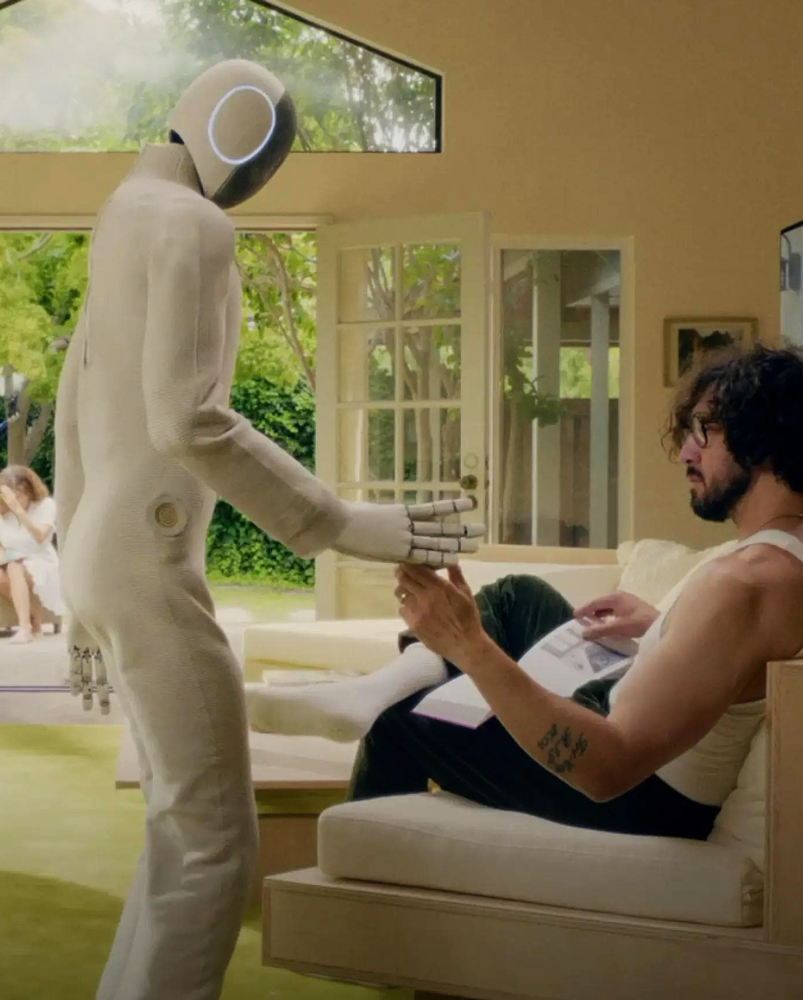
NEO is a full-size, bipedal humanoid robot designed to function in spaces built for people rather than machines. Doorways, hallways, furniture layouts, and everyday obstacles are all part of its design brief. It builds on earlier service robots developed by 1X that were used in controlled security and logistics environments, but NEO shifts the focus toward domestic and office-style settings. The long-term goal is not factory productivity, but general-purpose assistance that can safely operate near people.
Market Availability Today
NEO’s current market status sits somewhere between research project and mainstream consumer product. Orders and pre-orders are open directly through the manufacturer, and buyers can reserve or purchase units now. Deliveries are taking place gradually as production scales, with early customers and partner-style deployments receiving priority. What is not happening yet is mass retail distribution. You will not find NEO in electronics stores or available for immediate shipment in large volumes. Media coverage often describes this phase as the robot “hitting the market,” which is accurate in commercial terms, but it is still very much an early-adopter stage rather than a broad consumer rollout.
What NEO Can Do Right Now
NEO’s abilities are centered on safe, repeatable assistance rather than complex multitasking. In current deployments, its core functions include:

- Walking and turning with stable, human-like balance
- Navigating indoor spaces with furniture and everyday obstacles
- Picking up and carrying lightweight household objects
- Opening doors and interacting with basic fixtures
- Responding to spoken instructions in structured environments
These actions are performed deliberately and cautiously, prioritizing safety over speed. When the robot encounters unfamiliar situations or tasks beyond its trained routines, human operators can step in remotely to guide actions and collect data that can later be used to improve autonomy.
Hardware and Physical Design
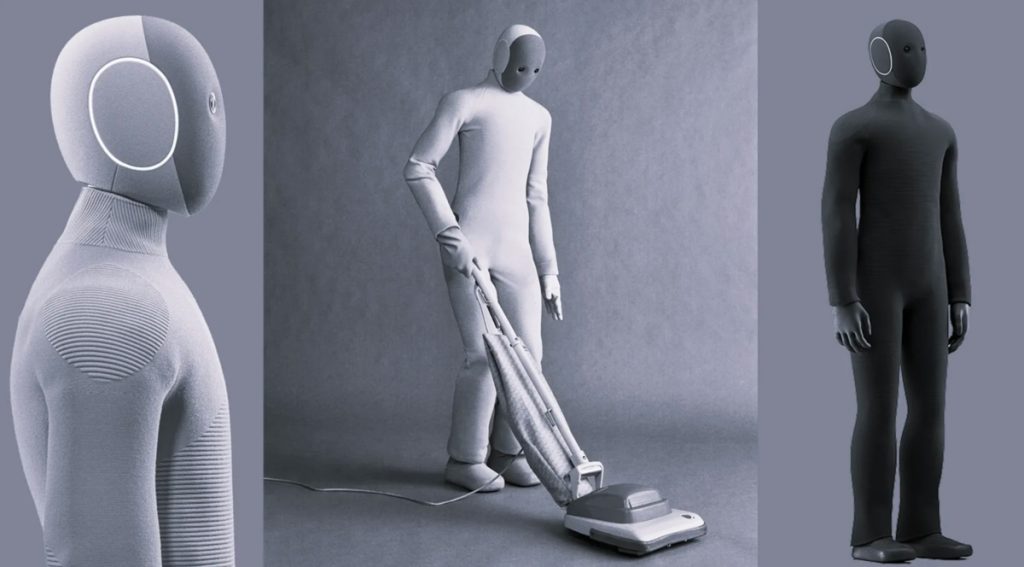
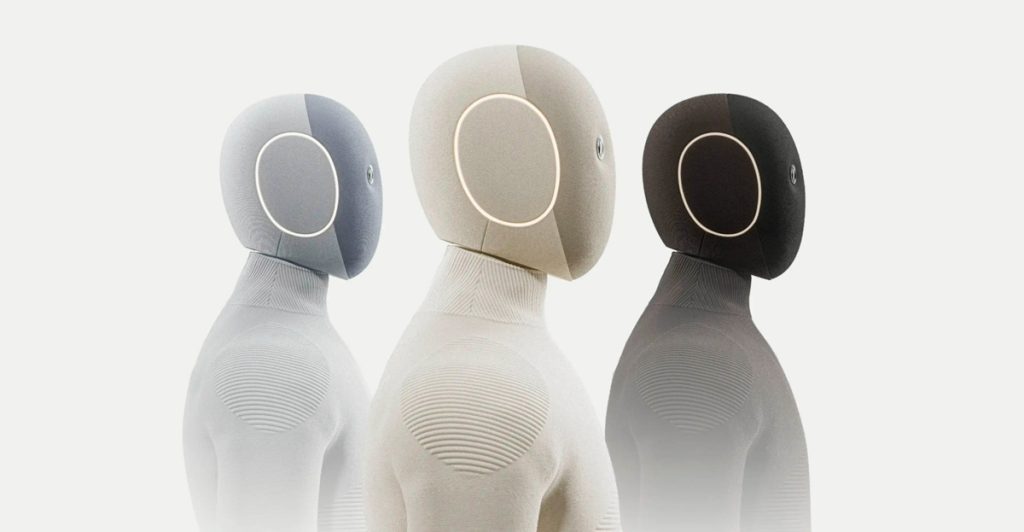
Physically, NEO looks very different from industrial robots, with a design philosophy built around safe coexistence with people. Key hardware characteristics include:

- Soft outer materials that reduce injury risk during contact
- Lightweight structure compared with factory-focused humanoids
- Electric actuators tuned for smooth, quiet indoor movement
- Compliant joints that absorb force rather than resist it rigidly
- Hands designed for general object handling rather than precision tool use
This approach trades raw strength for safety and adaptability, which is essential for operating in homes, offices, and hospitality environments.
AI, Learning, and Human Support
NEO operates on a hybrid intelligence model that blends onboard perception, language-based interaction, and human-in-the-loop support. It can interpret basic verbal instructions, recognize objects and obstacles through vision systems, and plan movements in real time. When situations become uncertain, remote operators can intervene, both to complete the task safely and to generate training data for future automation. Over time, repeated tasks can become increasingly autonomous as the system learns from prior demonstrations. Full independence in unpredictable home environments remains a work in progress, but this layered approach allows learning to happen without exposing users to unnecessary risk.
Why the Rollout Is Deliberately Controlled

Putting a humanoid robot into uncontrolled human spaces introduces a wide range of safety and reliability challenges. Falls, navigation errors, misidentified objects, and unexpected contact are all real risks that must be minimized before large-scale deployment makes sense. By limiting early distribution and carefully managing customer onboarding, 1X can monitor performance, refine hardware and software, and validate long-duration operation under real conditions. It may slow down mass adoption, but it significantly increases the chances that when broader availability does arrive, the system will be stable enough to be genuinely useful rather than merely impressive.
How NEO Fits into the Humanoid Robot Landscape
Most current humanoid robots are aimed at warehouses, factories, and logistics centers, where environments are structured and tasks are repetitive. Others remain primarily in research labs, demonstrating capabilities without sustained real-world use. NEO occupies a smaller and more challenging niche: operating in human environments where unpredictability is the norm. This focus makes it less optimized for speed or payload, but far more relevant to long-term service roles in homes, hospitality, healthcare support, and facility management. It is designed for proximity to people, not separation from them.
What Still Needs Improvement
Even with meaningful progress, several technical and practical gaps remain before humanoid robots can be considered truly everyday tools:
- Battery life limits how long NEO can operate continuously without recharging
- Hand dexterity is still well below human capability for fine manipulation
- Cluttered or rapidly changing environments remain difficult to navigate reliably
- Task understanding is strong for routines but weaker for novel situations
- Social interaction is functional but far from natural or conversational
These limitations set realistic expectations for early users and highlight where most development effort is currently focused.
What Comes Next
Near-term development is expected to focus on scaling production, improving battery efficiency, expanding autonomous task execution, and refining object manipulation. Each of these areas directly affects how useful the robot can be in everyday settings and how comfortable users feel relying on it without constant oversight. Wider consumer availability will depend not only on technical progress, but also on building support, maintenance, and safety infrastructure that can handle large numbers of deployed units.
Final Byte
NEO represents a genuine transition point for humanoid robotics: not just prototypes and promotional demos, but a robot that can be ordered and is beginning to appear in real environments. It is not yet the effortless home assistant of science fiction, but it is a market-ready platform taking careful, practical steps toward that future. Progress here is incremental, cautious, and very real — which, in robotics, is usually the most reliable path forward.


